追踪对象...
网站首页 > 惯性测量单元
-

-
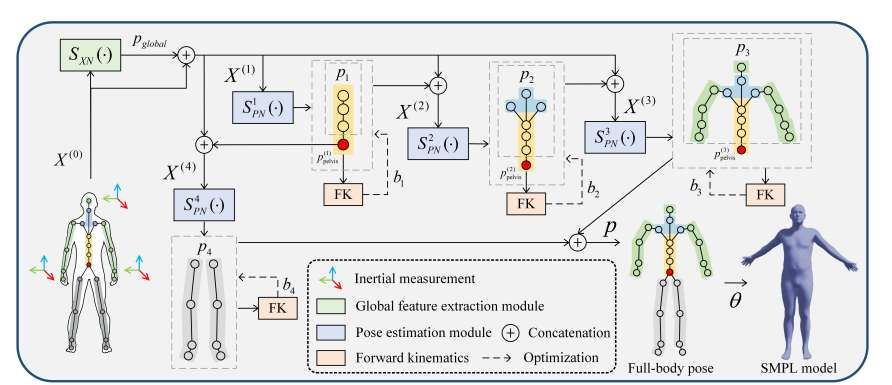
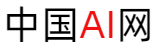
仅使用佩戴在头部和手腕的三个惯性测量单元传感器获取的惯性数据来估计全身姿态...
-

微软公布混合现实坐标配准专利技术,通过传感器数据捕捉用户指向/注视/触摸现实世界特征的行为,自动计算不同设备坐标系间的配准信息(含三维平移与旋转)。该技术需至少2个特征对应点(结合重力数据)或3个独立对应点,支持多人协同标注...
没有更多内容
追踪对象...
仅使用佩戴在头部和手腕的三个惯性测量单元传感器获取的惯性数据来估计全身姿态...
微软公布混合现实坐标配准专利技术,通过传感器数据捕捉用户指向/注视/触摸现实世界特征的行为,自动计算不同设备坐标系间的配准信息(含三维平移与旋转)。该技术需至少2个特征对应点(结合重力数据)或3个独立对应点,支持多人协同标注...
没有更多内容